
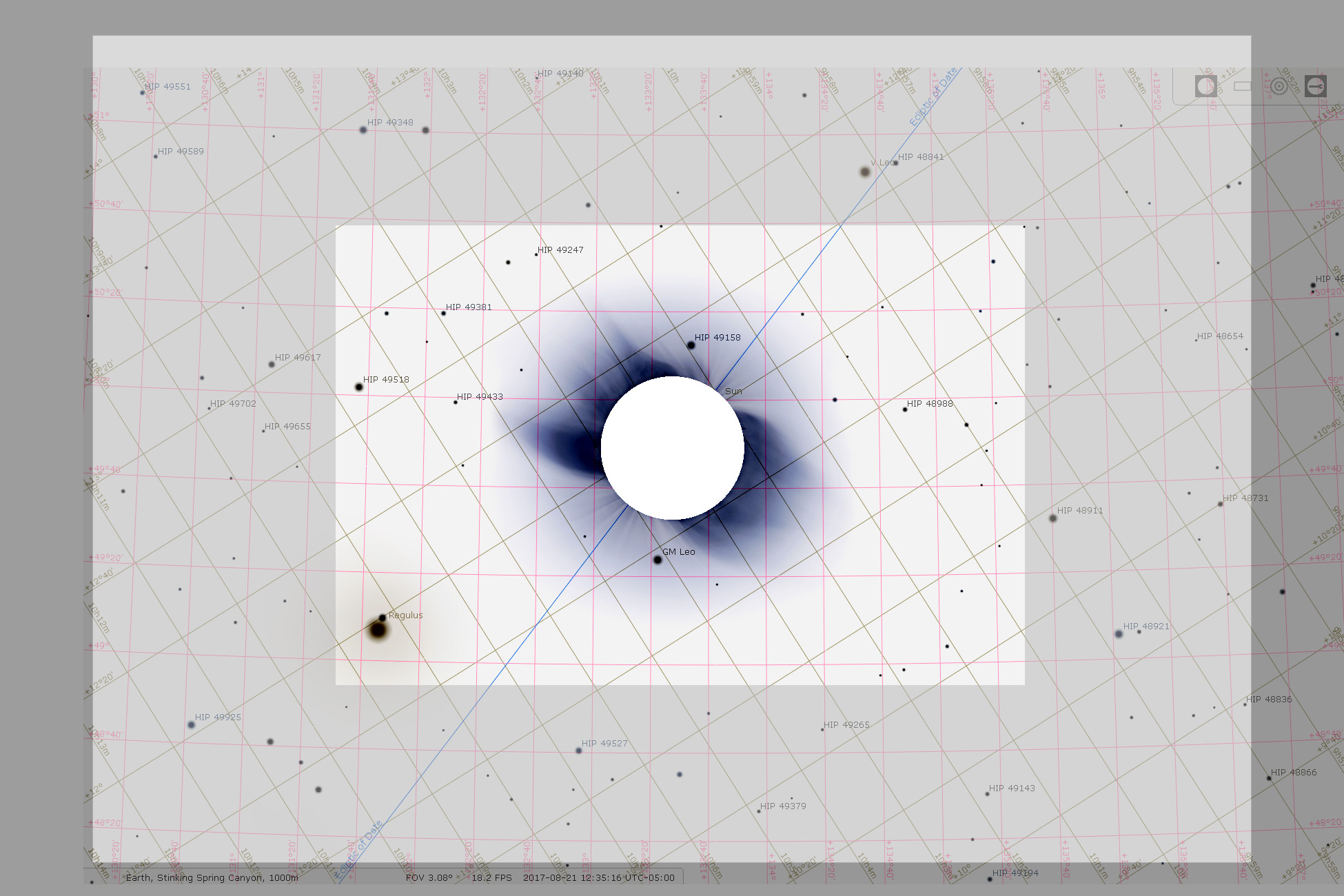
 The field of view for my EOS60Da APSC sensor (inner rectangle) and the EOS6D full-frame sensor (middle rectangle). The map overlay is the view from Idaho Falls on the day of the eclipse as displayed by Stellarium (and inverted to negative view).
The field of view for my EOS60Da APSC sensor (inner rectangle) and the EOS6D full-frame sensor (middle rectangle). The map overlay is the view from Idaho Falls on the day of the eclipse as displayed by Stellarium (and inverted to negative view).
Once we know where things are on the image, we need to correlate them to their celestial locations (right ascension and declination, or their equivalent). To do this, we need two landmarks in the image, one for position, and the other for rotation. We will position the image so the first landmark aligns with its celestial coordinate, and then rotate the image until the second matches up. This will provide a “rough alignment” so that the next step (point set registration) will have a good starting point for matching all of the stars in the field of view.
The reference coordinate system could, in principle, be any particular view of the sky. Using the pixel coordinates of the “before” image is a reasonable choice (as would be the “during” image). This would have the advantage of not needing to transform that image at all; it is already in the reference system — only the ‘during” image would need to be converted.
But to keep the mapping easy to think about, and utilize multiple before pictures, I chose the reference coordinate system to be that of a camera, aimed at the sun’s center, and oriented to “up” at the location where I will be taking the “during” photos (near Idaho Falls, ID).
To perform this transformation from image coordinates, we need the projected celestial coordinates of our landmark stars. One star that will be certain to be bright enough to record is Regulus, “the heart of the lion”, alpha-Leo, the brightest star in the constellation Leo, in which the sun will be residing in this eclipse (hence the astrological sign of those born during most of August, including me).
For the second landmark, the next brightest star in the field is nu-Leo, considerably dimmer. Its visual brightness is magnitude 5, compared to Regulus at 1.3, roughly 30 times dimmer.
To gain a sense of star positions, it is helpful to use a use a sky map simulator. I discovered a (free) open source program that does a very nice job of simulating the view of the night sky and allowing me to make maps of the area I am exploring. It is Stellarium (http://www.stellarium.org), and I have been able to identify and locate the candidate stars that will be near the sun during the eclipse.
Using Stellarium, I can identify the reference locations for my landmark stars:
Regulus: RA 10h 8m 22.01s, Dec 11o 58’ 2.9”
Nu-Leo: RA 9h 58m 13.35s, Dec 12o 26’ 41.1”
These are the brightest, but there are a few others that may be useful in case one or both of these are not in the image.
I need to map these angles onto the image plane of the virtual camera in Idaho that is aimed at the sun. This is a basic calculation in computer graphics, a field that I accidentally have some experience in.
Now that we have a reference frame established, we need to transform our before and during images into it. This too is a standard operation in computer graphics. All that is needed is the transformation matrix, a set of six numbers. Given two reference star locations, the six numbers can be calculated and applied to all the other stars in the image to find out where they land in the reference frame.
The virtual camera can have any number of pixels we wish. I decided that it would be convenient if one pixel represented one arc-second in the sky. The image frame from this virtual camera looks like this; the reference stars are plotted, and the alignment stars are marked. The stars detected from a one-second exposure of this part of the sky have been mapped into this reference frame.
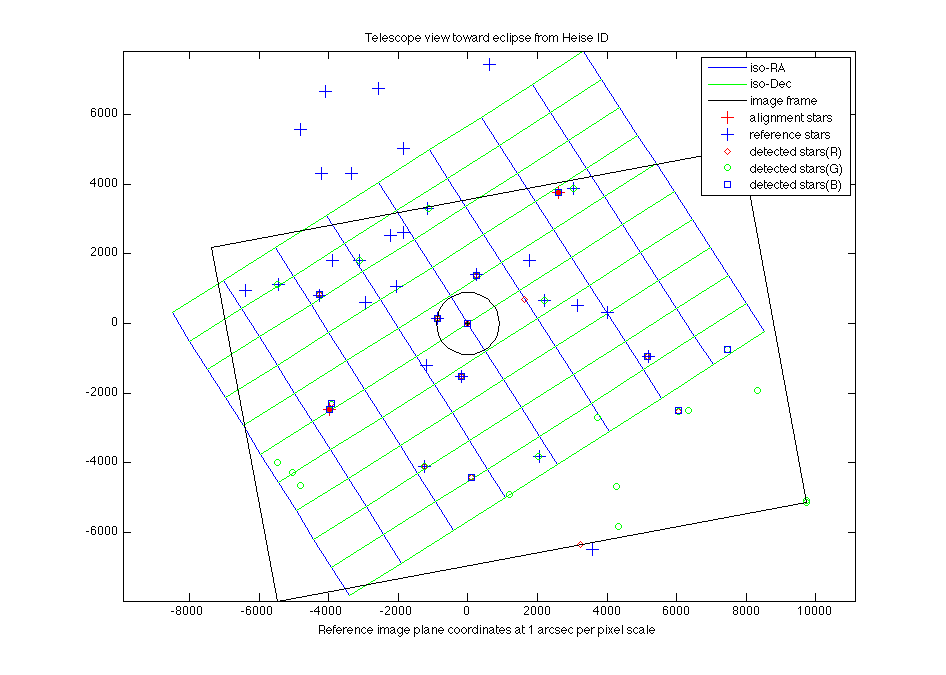 A test “before” image transformed to the reference virtual camera view at eclipse time in Idaho. The location where the sun will be is indicated, centered at coordinate (0,0).
A test “before” image transformed to the reference virtual camera view at eclipse time in Idaho. The location where the sun will be is indicated, centered at coordinate (0,0).